SAGA GROUP
嵯峨グループSAGA GROUP
嵯峨グループ
Research Leader
研究代表者
Research Content
研究内容
嵯峨グループにおいては、身体性を持つヒトと身体性を欠くAIとの中間的な存在としてロボットとのPHN伝達を担当する。ロボットを、身体性を伴うAIの一種と見なすことによってPHN伝達の検証を進める。このためにヒト-ロボット。ロボット-ロボット間での等価的PHN運用について検証する。人と自律ロボットとの共生の検証として、ヒトの生体情報を用いたロボット操縦において等価的なロボット用PHNを想定し、ヒトのPHNに相当する自律ロボットへの干渉手段によって自律ロボットに対する等価的な感覚運動身体性の抽出と行動誘導を介した検証を進める。これはヒト-AI間の異種身体言語間でのコモングラウンド獲得と同様に、ヒト-ロボット間、および異種のロボット-ロボット間での身体言語翻訳に相当し、主に項目3,4,5について異なる自律ロボットを異種AIと見立てた検証を進める。
ロボットを介した3つの実証アプローチ
ロボットを介した
3つの実証アプローチ
1
生体情報と身体運動性の抽出
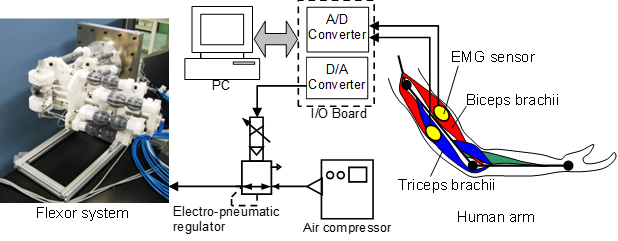
ヒトの生体情報である脳波や筋電位、触覚等の生体情報を用いて、ロボット用PHNのための感覚運動身体性の抽出を行う。生体情報には時系列データおよび周波数特性に基づく特徴抽出を行い、ヒトの連続的な行動決定の過程の解明とロボットとのインタフェース手法を検討する。
2
抽出された感覚運動身体性に基づく行動誘導のための人間類似型ロボットの開発
抽出された感覚運動身体性を、ヒト-ロボット間で等価的PHN運用に適切に評価できる感覚代替のセンサや生体の筋骨格などに基づく人間類似型ロボットを開発する。
3
身体性を伴ったロボット操縦の実現
ヒトの生体情報に基づき、ヒトからロボットへの行動誘導の実現を検証する。さらに、人間類似型ロボットから異種ロボットとの間で、感覚運動身体性の情報伝送を検討する。
Research Achievements
代表的な実績
Naoki Saito, Takumi Kobayashi, Kohei Akimoto, Toshiyuki Satoh, Norihiko Saga:Evaluation of a Passive-Assist Exoskeleton Under Different Assistive Force Profiles in Agricultural Working Postures:Actuators, Aug. 1, 2025.
Naoki Saito, Toshiyuki Satoh, Norihiko Saga:Comparison of Position Control Performance in Double Air Chambers Pneumatic Artificial Muscle:Journal of Robotics and Mechatronics, Feb. 20, 2025.
Mizuki Saga, Norihiko Saga:Gait Analysis of Elderly and Young People Based on Joint Angles and Positions:Applied Sciences, Oct. 22, 2024.
Naoki Saito, Toshiyuki Satoh, Norihiko Saga:Double Air Chambers Pneumatic Artificial Muscle and Non-Hysteresis Position Control:Actuators, Jul. 26, 2024.
Norihiko Saga, Yukina Okawa, Takuma Saga, Toshiyuki Satoh, Naoki Saito:Trial of Brain–Computer Interface for Continuous Motion Using Electroencephalography and Electromyography:Electronics, Jul. 15, 2024.
Jun-Ya Nagase, Sungna Yang, Toshiyuki Satoh, Norihiko Saga:Stability Analysis of Passive Monopedal Dynamic Hopping:IEEE Access, 2024.